運転モードと制御形態
I.CAS設定(カスケード)
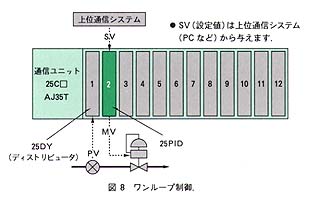
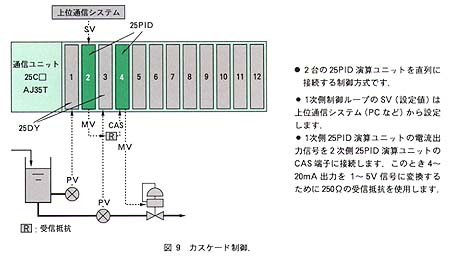
CAS入力端子のDC1~5V信号を設定値(以下SVと記す)としてPID制御を実行する。
II.通信設定(自動)
SVを上位通信システムから設定してPID制御を実行する。
III.通信MV出力(手動)
25PIDはPID演算を実行せず、上位通信システムから指定されたMVを出力する。
IV.MVホールド(手動)
このモードになる直前のMV値を変化させずに保持する。
PID制御を実行するためのPIDパラメータ等の定数の設定はプログラミングユニット(形式:PU-2)を使って行います。
(2)上位通信インタフェース
上位システムとPIDコントローラ間の通信は、上位側が常に主導権を持って行います。上位側から対象とするネストの局番、対象とするPIDコントローラが占有するチャンネル番号(1~16)を指定することによってデータ項目の入出力が行えます。上位システムとしプログラマブルコントローラとパソコンがあります。プログラマブルコントローラの場合は、アナログデータを扱うバイトやワード単位での転送命令によって通信します。
パソコンの場合には、RS-485インタフェースにより、ASCII文字列で定義したアナログデータの転送用命令で簡単に通信できるようにしています。
上位側に入力できる項目としては、 (I)PV値と(II)MVアンサーバック(25PIDユニットの端子から出力しているMV値)があります。いずれもデータ値の0~100%を0~4000(10進数)に対