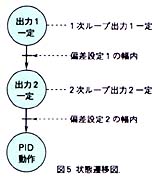
制御の過程は、以下に示す段階を追って進められます(図2参照)。
I.操作出力(MV1)を出力設定値1(100%)に固定して昇温を開始します。
II.温度が設定値に近づいて偏差設定値1に到達したらMV1をいったん、予測されるバランス値(出力設定値2)に固定します。
III.温度が偏差設定値2に到達したらPID制御を開始します。
偏差設定値1、2や出力設定値1、2およびPID設定値は、実運転結果によって決定します。
2.スーパーDCSのハード構成
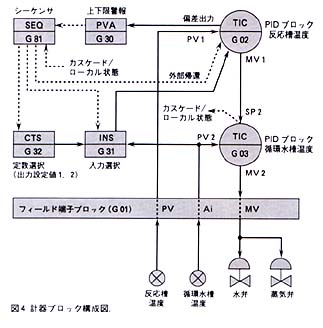
このバッチPID制御を実現するハード構成を図3に示します。ここでは、制御カード(形式:18MA)1台で2個分のPID制御ループを使用しています。
3.計器ブロックの構成方法
図4に制御カード内部の計器ブロック構成を示します。実線はアナログ信号を、破線は接点信号を示します。G01、G02、G03、G30~32、G81は、スーパーDCSのプログラムルールに従って付けたソフト計器のブロック番号です。接点信号は、すべてシーケンサブロックのリレーロジックで処理します。
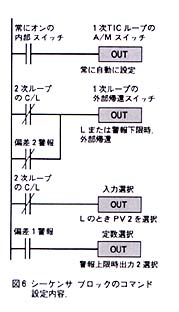
4.動作説明
図5はシーケンサの動作状態を示す状態遷移図です。偏差の大きさにより3種類の動作状態になります。
【高橋 和章・(株)エム・システム技研 取締役 製品担当】