ISAでのフィールドバスの標準化
(その21)
(株)エム・システム技研 開発部 主管技師
ファンクション ブロックの結合データの状態
今回は、ファンクション ブロック(以下ブロックと略す)間を結合する入出力データの状態を定義したSP 50の提案について考えてみましょう。
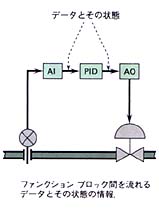
たとえば、流量制御系をフィールドバスで実現するには、アナログ入力、PID制御、アナログ出力の各ブロックを結合して構成します(図参照)。この方法はDCSによる制御系の構成方式と同じです。ただし、フィールドバスの場合はDCSと異なり、これらのブロックが物理的に異なる機器に埋め込まれ、ブロック間は通信により結合されます。このため、フィールドバスの通信が異常になった場合の対策が必要です。
SP 50ではブロック間を流れるすべてのデータ(PV、MVなど)に対して、それらのデータと1対1に対応する状態を持たせることを提案しています。その状態は複数の成分からなり、通信の状態以外にハードウェアの動作状態なども成分として持ちます。こうして定義した状態をブロック間の情報交換に利用します。また、現場機器のリモート診断にも使用できます。
SP 50では、状態として次の8つの成分を定義しています。そこでは複数の成分の同時セットもできます。
(1)No Communication(通信異常)
物理的に異なる機器からのデータの取込みに際し、通信異常が発生したときにセットされる。
(2)Bad value(不良値)
機器に異常があり、それから得られたデータが正しい値かどうか不明であることを示す。
(3)Not from process(プロセス データではない)
このデータはプロセスの情報を提供するデータではない。たとえば、制御演算をチェックするために演算の入力値を手動で設定した状態などがこれに相当する。
(4)Special(特別)
カスケード接続された下位のブロックの設定値を操作できるRCas(リモート カスケード)モードや制御出力を操作できるROut(リモート アウト)モードの状態で上位側から下位ブロックの操作を試みても、下位ブロック側の事情により操作を受けつけない状態。
(5)Path to process failed(出力経路フェイル)
カスケード接続された下位ブロックの制御モードがO/S(機能停止)かLO(出力がローカル オーバライド)の状態にあり、ブロックの操作出力がプロセスに届かない状態。
(6)No Initialization path(初期化経路なし)
ブロックの出力値を初期化できない状態。たとえば、ブロックの出力がプロセスに届かない不正なブロック間の結合が定義されている場合がこれに相当する。
(7)Anti-windup high(出力上限操作停止)
カスケード接続された下位ブロックの出力が上限リミットに達し、これ以上は出力を操作できない状態。制御を継続すると出力はワインドアップする。
この状態はブロックでの制御動作のワインドアップを防止するために使用できる。
(8)Anti-windup low(出力下限操作停止)
カスケード接続された下位ブロックの出力が下限リミットに達し、これ以下は操作出力を操作できない状態。