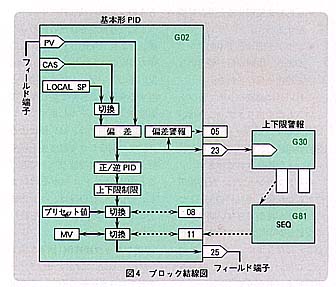
G 30:上下限警報器
ITEM11:接続端子
今回の場合は0223とします。これはコントローラの偏差出力値です。
ITEM13:下限設定値
今回の場合は-20とします。偏差出力値が-20%となったときPID制御に移行させるためです。
G 81:シーケンサブロック
ITEM 10:95
ITEM 11:130000 STEP 00
ITEM 12:013012
警報設定器警報入力
ITEM 13:070208
プリセット値出力
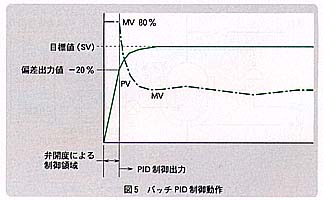
バッチスタートでコントローラからMV値として80%を出力します。これによって温度が上昇して行き、目標値(SV)から-20%の温度に達します。これ以降は、PID制御によって一定温度にコントロールします(図5)。
今回は説明を省きましたが、バッチ制御はメインのバッチシーケンスと組み合わされるのが一般です。メインのバッチシーケンス制御にPLCを用いても、バッチPID制御を構成できます。このときは、PLCインタフェース(形式:SMDL)を用いてPLCと接続します。なお、ABA自身もシーケンス機能をもっていますから、この機能を使用してもバッチPID制御は実現可能です。
PLCとABAのシーケンス機能の両方をうまく組み合わせて使用することによって、より良いシステムを構築することができます。今回ご紹介した例は、その中の極く一例にすぎません。
ABAはコントロール機能2個、演算器40個、シーケンスコマンド1000個の機能をもっていますから、これらを組み合わせることによって、さらに複雑なシステムをも容易に実現することができます。
なお、ABA単体では外部端子の制約があり、入出力点数が不足することが考えられます。しかし、通信機能(NestBus)が標準装備されていますから、NestBusを標準装備しているMsysNetシステム製品を直結でき、入出力点数の不足の心配は不要です。
ここにご紹介した例を参考にして、システムを実際に組んでみてください。難しい点はなく、容易にシステムを構成していただけます。(次号へ続く)