流量計によって得られる測定値は、一般に調節計出力に対する応答が速く、かつ測定値に小さなノイズが常時のっていることが多いのです。微分動作はこのノイズを拡大しますので、制御にとって有害です。したがって、流量制御にはPI動作を使用するのが原則です。
(2)圧力
圧力制御プロセスの特性は、おおむね流量制御プロセスに近いので、PI動作を使用するのが一般的です。
(3)液面
液面制御では、液のレベルを一定の位置にきちんと保つことは通常必要ではなく、ある範囲に入っていればよいという場合が多いのです。すなわちタンクから液があふれず、また空になってポンプが空気を吸い込んだりしなければよいわけです。したがって比例帯の広いP動作(またはPI動作)調節計が使用されます。さらに、タンクに流入する流量の変動を吸収する目的に使うときは、液のレベルを一定に保つとその変動の吸収ができませんので、この目的に対してはむしろよくないことになります。たとえば、複数の製造工程があるとき、前の工程からくる流量に変動があるときは途中にバッファタンクを置き、その変動を吸収する必要があります。このときバッファタンクのレベルは故意にレベルの変動を許し、流出流量の安定化をはかる方法がよく用いられます。これを均流液面制御といいます。
この目的を達成するにはいくつかの方法がありますが、代表的な方法はギャップ付PID動作です(図6.1)。この図にある実効偏差というのはPID演算を行うための偏差です。したがって③では偏差がギャップ幅の内にあるときは、調節計出力はまったく変化しません。すなわち、レベルの偏差がある範囲(ギャップ幅内)に入っているうちは調節計の出力はほとんど変わらず、レベルがその範囲を超えたときのみ調節計の出力が大きく変化して、レベルをギャップ幅の内に追い込むのです。
(4)温度
温度制御では、一般にPID動作が使用されます。オンオフもしくはP動作でよい場合も多いのですが、最近はPID調節計が非常に安くなったので、PID動作が使用されています。目的によっては、複数のPID動作を切り換える方法とか、ファジィ制御を使用する例もあります。
(5)成分
成分制御では、一般にむだ時間が大きく、かつ操作出力と測定値の関係が直線的でないことが多いのです。そのため通常のPID制御ではうまく制御できないことも多く、そのときはいろいろな工夫が必要となります。
◆ 参考・引用文献 ◆
1)松山 裕:だれでもわかる自動制御、省エネルギーセンター(1992)
2)須田 信英ほか:PID制御、朝倉書店(1992)
3)計測自動制御学会編:セルフチューニングコントロール、コロナ社(1996)
4)東芝カタログ:ワンループコントローラ

松山 裕
松山技術コンサルタント事務所
所長
(FAX No. 03-3971-9143)
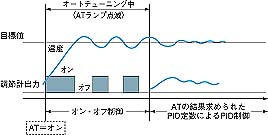
図5.7
リミットサイクル法による
オートチューニングの経過1)
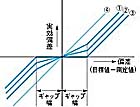
図6.1
ギャップ付PID動作1)