PID定数の調整(その1)
松山 裕
まつやま ゆたか
松山技術コンサルタント事務所 所長
まつやま ゆたか
松山技術コンサルタント事務所 所長
4.PID定数の調整
これまでPID制御のもつ意味を説明してきました。しかし、これだけではPID調節計を調整することはできません。対象プロセスの特性を調べ、制御の目的に合うように比例帯・積分時間・微分時間(これらをPID定数といいます)を調整しなければなりません。そこで、制御の目的とは何か、対象プロセスの特性を調べるにはどうするのかを考え、次にPID定数の調整法について検討することとします。
4.1 制御の目的と制御の経過
調節計により対象プロセスを制御する目的には、次の2つがあります。
(1)目標値を変更したとき、できるだけ速く測定値が目標値に一致するようにすること。
(2)外乱によって測定値が目標値からずれたとき、できるだけ速く元に戻すこと。
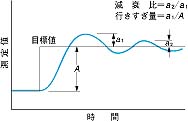
前者を目標値変更への対応、後者を外乱への対応といいます。まず前者について考えてみます。階段状に目標値を変更したときのPID制御における測定値は、たとえば図4.1のような経過をたどって変化します。この図では、測定値は最初目標値をオーバーしたあと、若干振動しながら目標値に落ち着きます。このように、一時的に目標値をオーバーすることをオーバーシュートといい、そのオーバーした量を行きすぎ量といいます(定義は図4.1参照)。また目標値を変化させてから、測定値が目標値に一致するまでの時間を整定時間といいます。
多くの場合、オーバーシュートしないように調整すると、測定値はゆっくりと上昇して行くので、整定時間は長くなります。したがって若干はオーバーシュートさせる方が整定時間は短くてすみます。とはいっても、行きすぎ量が大きすぎると制御プロセスに支障がでたり、プロセス内部の物質が変質したりすることがあります。金属の熱処理とか、食品の加熱殺菌における温度制御はその例です。したがって、オーバーシュートしないように調整するか、オーバーシュートを許すとしてもどの程度まではよいかは、制御の目的によって異なります。結論として、許される行きすぎ量をガイドラインとして、その条件の下で整定時間が最小になるようにPID定数を調整することが好ましいといえます。これをPID定数の最適調整といいます。
このガイドラインとしては、図4.1に示した減衰比も使用されます。ただしこれはオーバーシュートすることを前提としています。ほかにもいくつかのガイドラインがありますが、説明は省略します。
以上目標値変更への対応について説明しましたが、外乱への対応についても同じようなことがいえます。外乱が入ってきたとき、当然測定値は変化しますが、そのあと目標値を通過して逆の方向へ振れることもあるし、振れないで目標値に一致するようになることもあります。これはPID定数の調整により変わります。ただし、目標値変更への対応と、外乱への対応とでは、最適調整のPID定数値は異なります。
4.2 制御プロセスの特性のはかり方
制御の対象となるプロセスの特性を調べる方法には2種類ありますが、ステップ応答法が一般的です。これは、制御動作を行っていない状態で、調節弁を階段状に一定開度変化させ、そのときの測定値の変化を見る方法です。通常調節弁開度を変化させると、測定値は最初ゆっくりと変化します。しばらくすると変化速度が速くなり、そのあとまたゆっくりと変化し最後には一定値に落ち着きます。この様子を図4.2の太線に示します。