オートチューニング(その1)
松山 裕
まつやま ゆたか
松山技術コンサルタント事務所 所長
まつやま ゆたか
松山技術コンサルタント事務所 所長
5.オートチューニング
前号、前々号においてPID定数の調整法について説明しました。これらは言葉で説明する分では簡単ですが、やはりやってみるとやや面倒です。また人による個人差もでてきます。そこで、調節計自体がプロセスの特性をはかり、これよりPID定数を計算し、自動的に格納して制御を行う方式が開発されました。これをオートチューニング(セルフチューニングともいう)といいます。
オートチューニングには、大きく分けて2つの方法があります。
(A)オートチューニングのために、プロセスに対し特に信号を加えない。プロセスの制御状態を見て判断する。
(B)オートチューニングのために、プロセスに対し何らかの信号を加え、その反応を見て判断する。
(A)は例えていえば、医者が患者の体の動かし方やしゃべり方を観察し、患者の病状を知るようなものです。患者に苦痛を与えることはないのですが、情報量がやや少なくかつ不確実な傾向があり、また一般には時間がかかります。(B)は例えていえば、聴打診やいろいろな検査を行うようなものです。情報量は多くかつ早く入手できますが、通常患者に苦痛を与えます。
上記2方法とも、多くの方式が製品化されていますが、本号では(A)を説明し、(B)は次号に譲ることとします。
5.1 プロセスに信号を加えない方法
これには下記の3つの方式があります。以下この順で説明します。
(I)波形観測法
(II)入出力データ観測法
(III)ステップ応答法+波形観測法
(1)波形観測法1)
プロセスを制御しているとき、目標値を変更したり外乱が加わると測定値は変動しますが、このときの変動波形よりPID定数が適当であるか否かを判断し、必要により修正を加える方法を波形観測法といいます。熟練したオペレータは、これらの変動波形を見てPID定数を修正するので、エキスパートの知恵を取り入れるという意味でエキスパート法ともいいます。測定値の変動波形は、一般には図5.1のようになりますので、これよりオーバーシュート量やダンピング量を計算し、これらがあらかじめオペレータが設定した許容量内に納まり、かつ安定した制御状態が得られるPID定数値を求めて調節計に格納します。
この方法は1984年アメリカのフォックスボロー社が開発したものです。なかなかよい方法ですが、最初に何らかのPID定数値を入れなければいけないこと、複数の自然の外乱なり目標値の変更がないと最適PID値を得にくいことなどの問題があります。パテントの問題もあり、日本ではこの方式を採用しているメーカーはありません。
(2)入出力データ観測法2)、3)
原理図を図5.2に示します。調節計はオペレータの指令によりオートチューニングを開始したら、一定時間プロセスへの入力(調節計出力)とプロセスからの出力(測定値)を観測します。この2つのデータよりプロセスの特性(むだ時間、時定数、プロセスゲイン)を推定

図5.1
測定値の変動波形
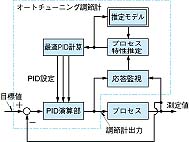
図5.2
入力データ観測法による
オートチューニングの原理2)