この方法は、調節計が自動運転のときにプロセスの入出力データを観測するわけですから、最初に調節計に仮のPID定数値を入れなくてはなりません。すでに自動制御の経験がある場合はよいのですが、そうでない場合は、オート・スタートアップモード(STCモード=2)を指定してPID定数の初期値を求めます。これは、調節計を手動操作にしてプロセス運転をスタートさせ、次いでステップ状のテスト信号を調節計出力に加え、測定値の変化によりプロセス特性を推定するものです。これは前々回に説明したステップ応答法と同じです。
なお、測定値の変化がほとんどない場合はPID値が最善であるかどうかがわかりません。そのため自動運転中に、オペレータがステップ状のテスト信号を自動出力に上のせし、オートチューニング機能を働かせることもできます(オンデマンドモード)。
(3)ステップ応答法+波形観測法4)
上記(1)、(2)の方法では、最初にPID定数を何らかの方法で求め、これを調節計に入れることが必要です。しかし最近開発された温度調節計で、この操作を不要にしたものがあります。
温度調節計では、運転開始にあたって目標値を設定し、直ちに電源を入れることがよくあります。これはいわばステップ応答を求めているのと同じことです。したがって、運転スタート時の測定値の変化よりプロセスの特性を求めることができます(図5.4)。しかしこれは必ずしも定常運転時のプロセス特性と同じではありません。そこで、制御中に外乱などが入ったときにその外乱応答波形を利用してPID定数が適当であるか否かを調べ、適当でないときはこれを修正します。また、プロセスの特性が変化して応答波形が振動し始めたときも、この波形データより振動がおさまる方向にPID定数を修正します。
◆ 参考・引用文献 ◆
1)磯崎 茂和:EXACTセルフチューニング調節計、計装、Vol.29、No.11、p.40~43(1986)
2)松山 裕:だれでもわかる自動制御p.28~30、省エネルギーセンター(1992)
3)高津 春雄:インテリジェント・セルフチューニング・PIDコントローラ、コンピュートロール、No.32、
p.124~127(1990)
4)塚部 智之:セルフチューニング温度調節器、セルフチューニングコントロール(計測自動制御学会編)、
p.158~169、コロナ社(1996)

松山 裕
松山技術コンサルタント事務所
所長
(FAX No. 03-3971-9143)
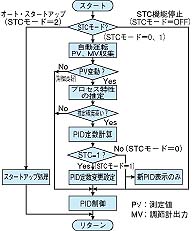
図5.3
オートチューニング動作フロー3)
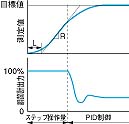
図5.4
ステップ応答法における
オートチューニング4)