10.3 目標値設定機能
調節計に目標値を設定するには、人間が手で設定する方法と、外部の計器(調節計または伝送器)からの信号により設定する方法の2つがあり、前者をローカル設定、後者をリモート設定といいます。後者は第8回で説明した追値制御に使用される方法であり、カスケード制御に使用されることが多いので、リモート設定のことをカスケード設定ということもあります。
ローカル設定で運転しているとき、リモート設定に切換えますと、当然両設定値の間には差があります。そのため、切換え時に突然大きな偏差が調節計に加えられることになり、出力は急変します。この対策にはいくつかあり、調節計により異なります。
一番簡単なのは、目標値変化率制限機能を利用する方法です。これを利用すれば、設定した値以上の変化率で目標値が急変することを防ぐことができます。なお、リモート設定値トラッキング機能をもっている調節計の場合は、ローカル設定からリモート設定への切換時に出力が変化することを防げますが、この説明は省略します。
目標値設定に関する機能では、ほかに目標値の設定範囲を制限する機能があります。これはオペレータが誤って過大または過小の目標値を与えることを防ぐ機能です。
10.4 入力機能
入力機能とは、入力に何らかの処理をしてから制御演算のための入力とする機能です。これには加減算・乗除算などの四則演算、開平・リニアライズなどの関数演算、一次遅れフィルタや移動平均などの時間演算などがあります。以下代表的なものについて説明します。
(1)フィルタ
プロセスによっては、測定値が絶えず変動していることがあります。このような場合は指示値が安定せず見にくいばかりでなく、制御上にも悪い影響を与えることがあります。これを防ぐため、測定値を平滑化することが有効です。この機能のなかで代表的なものが一次遅れフィルタです。この機能は図10.2(第4回の図4.3の再掲)に示す特性をもっています。
このフィルタに速い変動の入力を入れるとほとんど出力は出ません。しかしゆっくりした変動の入力に対しては、ほぼ元の変動波形と同じ出力が出ます。すなわち低い周波数の信号だけを通します。そこでこのようなフィルタをローパスフィルタといいます。
(2)開平演算
オリフィスから差圧伝送器を経て調節計へ入ってくる信号は、流量の2乗の特性をもっています。そこで、調節計の入力側に開平機能を使用し、流量に比例した信号に変換して制御に使用します。ただし、入力が非常に小さい所では非常に拡大することになる(たとえば入力1%は、開平機能を通すと10%になります)ので、零点が不安定になります。そのため、入力が小さい所ではこれをカットするとか、1%以下では開平しない(入力1%では10%にし、1%以下は入力のままとする)などの方法をとります。
(3)その他
四則演算は、主として差圧式流量計の温度・圧力補正に使用します。リニアライズ機能は、熱電対や測温抵抗体を直接調節計に接続するとき、温度に比例した信号を得るためなどに使用します。
◆参考文献◆
1)松山 裕:だれでもわかる自動制御、省エネルギーセンター(1992)

松山 裕
松山技術コンサルタント事務所
所長
(FAX No. 03-3971-9143)
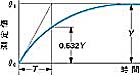
図10.2
一時遅れ特性1)