|
トップページ >PID制御のお話 第6回 |
|||||||||||
| 2004年7月号 | |||||||||||
PID制御のお話
|
|||||||||||
| ワイド制御技術研究所 所長 広 井 和 男 |
|||||||||||
P(比例)制御系の場合には、原理的にオフセットが発生し、制御量を目標値にピッタリ一致させることができないことを前2回で説明しました。P制御では(1)式に示すように、ある負荷で偏差がゼロになるように、バイアスbを調整しておき、この平衡状態から偏差e
が発生したとき、偏差e に比例した修正出力を出すことになっています。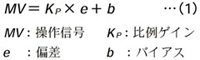 P制御では、制御性評価指標を「現在の偏差e の大きさ」としており、この現在の偏差e を抑制するために偏差e に比例した修正出力を出していることになります。
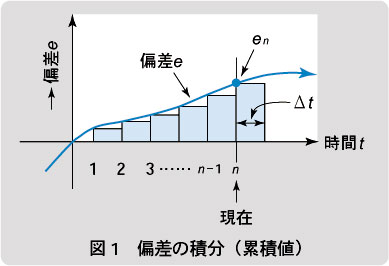
図1に示すように、一定時間間隔Δt で、偏差e に比例してバイアスbを修正し続ければよいことになります。この修正は、P制御では一定であったバイアスbが、(2)式に示すように偏差面積(偏差e の積分または累積値)に比例して増減することを意味しています。 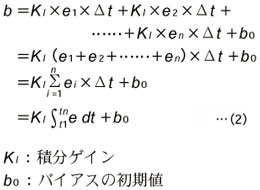 (2)式を(1)式に代入すると(3)式を得ます。 この積分を含む調節計を使えば、偏差e がゼロにならない限り、偏差e を積分して制御出力が変化し続けて、制御量を目標値に近づけていきます。このようにしてI(積分)制御によってオフセットを除去することができます。なお、I 制御単独では定常状態はよくなっても、そこに至るまでの時間的経過特性、つまり動特性をうまくいくようにすることは難しいので、実際には必ず(3)式で示すように、P制御と組み合わせたPI(比例積分)制御が用いられます。P制御では、制御性評価指標を「偏差の現在値」として、これを抑制するために偏差の現在値e に比例した修正出力を出しています。これに対して、I制御では、制御性評価指標を偏差の累積値(積分値)として、偏差面積に比例した修正出力を出しているとみることができます。
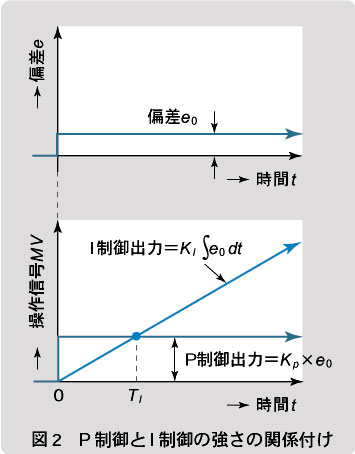
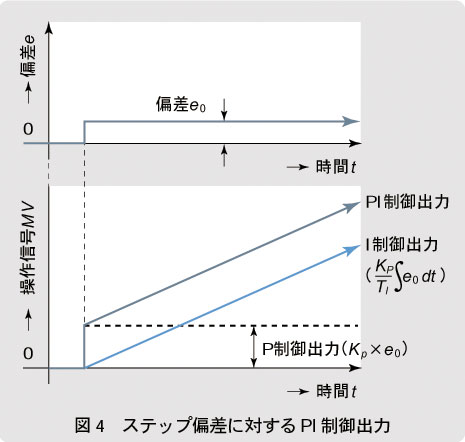
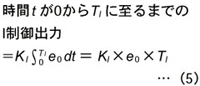 (4)式=(5)式として、KI を求めると(6)式になります。 (6)式を(3)式に代入すると、(7)式を得ます。(7)式が、いわゆる「PI制御式」です。 積分時間TI は、ステップ偏差を与えたとき、P制御による操作信号変化に相当する操作信号変化をI制御のみで発生させるために必要な時間ということになります。したがって、積分時間TI を小さくすればするほど積分制御の影響が強くなります。積分時間TI の逆数をリセット率(回/min)と呼び、これを使うこともあります。これはステップ偏差を与えたとき、I制御による操作信号変化量がP制御のみによる操作信号変化量に1分間中何回到達するかを表しています。
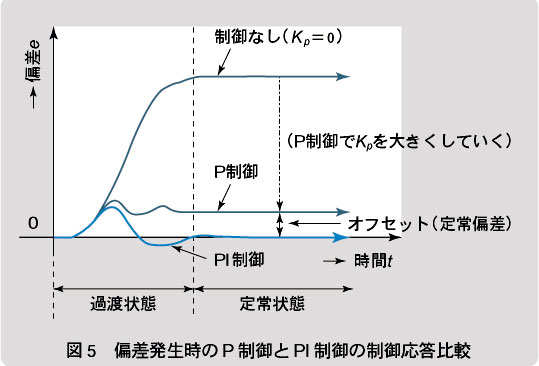
図3に示すPI制御系において、目標値を変化させてステップ偏差を与えたときの制御応答特性を図5に示します。図を見ると、制御なし(KP=0)の場合には大きな偏差が出ますが、P制御で比例ゲインKPを大きくしていくと偏差は小さくなっていきます。しかし、比例ゲインKPを大きくし過ぎると制御応答が振動的になるので、KPの大きさには限界があり、P制御のみではオフセットが残ってしまいます。 そこで、I制御を付加してPI制御にすると、I制御機能によって偏差がある限り偏差をゼロにしようとして操作信号を増減し続けるため、定常状態では偏差はゼロになり、オフセットがなくなります。したがって、PI制御では制御量を目標値にピッタリ一致させることができます。■ |
|
||||||||||
|
|||||||||||