| 2004年2月号 | |||||||||||||
PID制御のお話
| |||||||||||||
| ワイド制御技術研究所 所長 広 井 和 男 | |||||||||||||
連載の内容は、基礎から2自由度PID制御まで11回を予定しています。やさしい説明を目指しますので、ご愛読をお願いします。
このPID制御については、その生い立ちから、最先端まで詳しく説明して行きますが、ここで、PID制御基本式はどのようなものであるかについて、簡単にふれておきます。 PID制御基本式は下記の(1)あるいは(2)式のように表わされ、現在の偏差eに比例した修正量を出す比例動作(Proportional Action:P動作)と、過去の偏差の累積値に比例した修正量を出す積分動作(Integral Action:I動作)と、偏差eが増加しつつあるか減少しつつあるか、その傾向の大きさに比例した修正量を出す微分動作(Derivative Action:D動作)との3つを加算合成したものです。
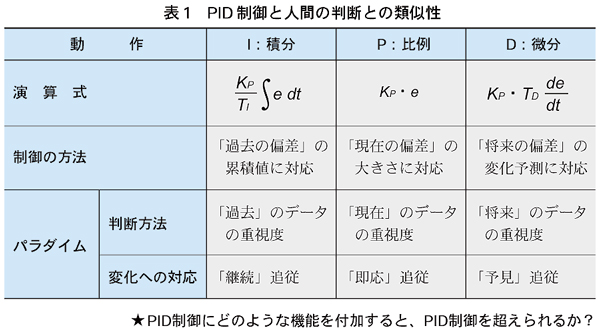
1)判断方法 表1に示すように、PID制御の積分動作は過去の偏差の累積値、つまり「過去」のデータの重視度を示し、比例動作は現在の偏差の大きさ、つまり「現在」のデータの重視度を示し、微分動作は偏差の将来の予測値、つまり「将来」のデータの重視度を示しています。制御対象の特性に対応して、人がPIDパラメータ値(各項の強さの設定値)を調整するのがマニュアルチューニング(手動調整)で、それを自動的に行うのがオートチューニング(自動調整)です。人間が物事を考えて判断するときには、必ず「過去の状態はどうであったか」、「現在の状態はどうなっているか」、「将来はどうなりそうか」という、「過去」、「現在」および「将来」の3種の情報を用いて、それぞれの情報にどのようなウエートをおくかを考えて結論を出します。これとまったく同じ機能をPID制御が実行していることになります。 人間の場合にも、パラメータ設定値のバランスの悪い人がいます。たとえば、過去の後始末をしっかりする、つまり積分動作は良く効いているが将来の予測がまったくできない、つまり微分動作が効かない人もいれば、反対に微分動作が効き過ぎて予測ばかりして後始末の不得意な人もいます。 一般的に、良い結論を出すためには、個々の問題の特性に対応して「過去」、「現在」および「将来」の情報の重視度を最適に調整しなければならないことを示しています。 2)変化への対応 PID制御において、目標値と実際値との間にズレが発生したとき、つまり偏差eが発生したとき、比例動作は偏差eの変化に対して、直ちに応動するという「即応追従」動作をし、積分動作は偏差eがゼロになるまで、つまり目標値と実際値がピッタリ一致するまで制御出力を出し続けるという「継続追従」動作をし、さらに微分動作は偏差eの変化率の大きさから将来の動きを予測し、これに対応する制御出力を出す「予見追従」動作をしているとみることができます。つまり、PID制御は、変化に対して「即応追従」、「継続追従」および「予見追従」という動作を組合せて制御を実行していることになります。 この「即応」、「継続」および「予見」という3つの側面から目標達成に取り組むことは、制御のみならず目標管理、製品のVA(Value Analysis)/CD(Cost Down)、技術力強化などあらゆる取り組みに共通する基本的手法です。PID制御は目標達成に向けての基本行動パラダイムを私達に明確に示しているといえます。
このように、PID制御は分かりやすくシンプルな構成でありながら、プロセス制御の大部分の対象に対してすぐれた制御能力をもっています。これが、PID制御を超える汎用制御方式の誕生を許さない要因ではないでしょうか? これらの考え方をベースとして、PID制御にどのような機能を付加すればPID制御を超えられるか、を考えれば、新しい制御方式を生み出すことが可能かもしれません。読者の皆さんの積極果敢な挑戦を期待しています。 ■ |
|
||||||||||||
|
|||||||||||||