計装豆知識
プロセスの自己平衡性
印刷用PDF プロセスの制御システムを検討・設計するにあたっては、まず対象となるプロセスや装置の特性(プロセス特性)を把握しておくことが重要です。ここでは基本的なプロセス特性の一つとして、自己平衡性のないプロセスと自己平衡性のあるプロセスの違いについて簡単に解説します。
自己平衡性のないプロセスの例-タンクの液位(1)
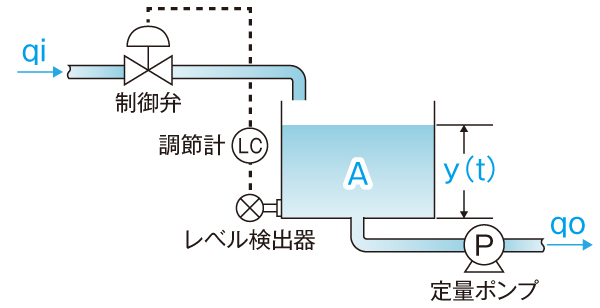
図1 タンクの液位の制御(1)
図1は液体を貯蔵するタンクで、液体を定量ポンプで抜き出しながらタンクの液位を液体の流入量を操作して制御するプロセス例です。ここで、タンクの流入量と流出量が等しければタンクの液位は変化しませんが、両者に差が生じるとその大きさに比例した速度(変化率)で液位が変化します。
これを式で表すと次のようになります。

y(t):タンクの液位 A:タンクの断面積 qo:定量ポンプの抜き出し量 qi:流入量
液位の変化率を時間で積分すれば液位になるので、qo=一定、qiーqo=x(t)として(1)式を変換すれば

Aを時定数Tとして、(2)式を伝達関数で表すと

(2)、(2)’式が示すように、タンクの液位は流入量と流出量の差の時間積分で表され、このようなプロセスを「積分性のプロセス」と呼びます。
図2はこのプロセスで流入量がステップ状に変化した場合の液位の応答を示します。流入量と流出量が一致していない限り、最終的には液位が上昇してタンクが溢れ出すか、液位が下がって空になるかのいずれかになります。このような性質を「自己平衡性がない」といい、積分性のプロセスは自己平衡性をもちません。一般に自己平衡性のないプロセスは制御なしで長時間放置することはできないので、何らかの自動制御が必要になります。
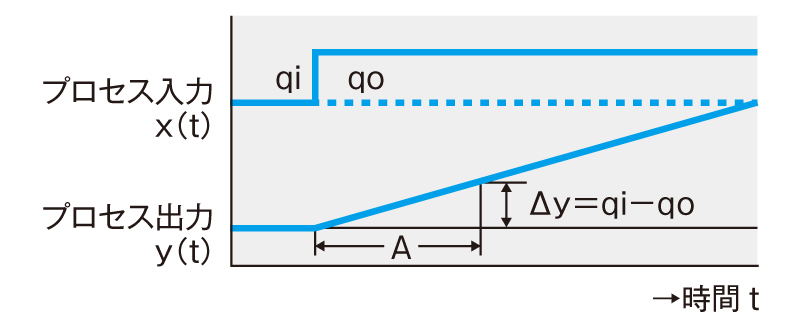
図2 ステップ状変化に対するタンクの液位の応答
自己平衡性のあるプロセスの例-タンクの液位(2)
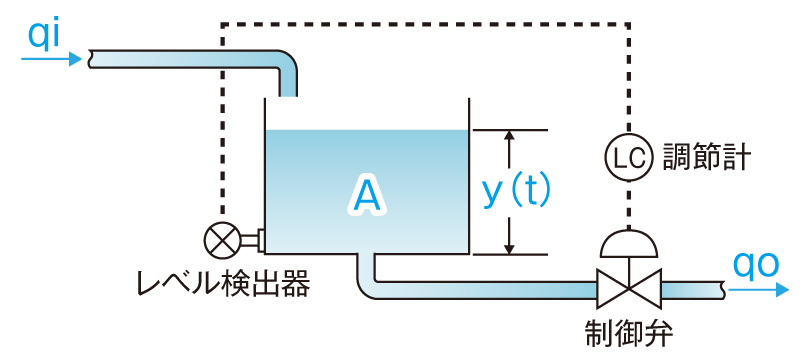
図3 タンクの液位の制御(2)
図3は図1と同様なタンクのプロセスで定量ポンプを制御弁に置換え、流入量は何も操作しない場合のプロセス例です。タンクの液位と流入量、流出量の関係は前例と同様に(1)式で表されますが、もし流入量が増加して液位が上昇すれば制御弁入口の水頭圧が上昇して流出量の増加をもたらします。また逆に流入量が減少して液位が下降すれば流出量が減少します。この作用はプロセスが自然に平衡を回復する(バランスを保つ)ように働くので「自己平衡性」と呼ばれます。
ここで、制御弁などの流出抵抗をRとすれば流出量がレベルに比例する(*1)ので

(1)、(3)式、および qi=x(t)とすれば

ARは時定数Tと同義になるので、AR=Tとして置換えると

(5)式を伝達関数で表すと

(5)、(5)’式はタンクの液位が流入量の変化に対して、時定数Tとした一次遅れ要素の特性をもつことを示しています。 図4は流入量 x(t)がステップ状に変化したときの液位y(t)の応答を示すものです。応答曲線の立ち上がりに接線を引いて、それが最終値に達するまでの時間が時定数になります。またx(t)が変化してから時定数と同じ時間が経過したとき、 y(t)の値が最終値の63.2%になります。
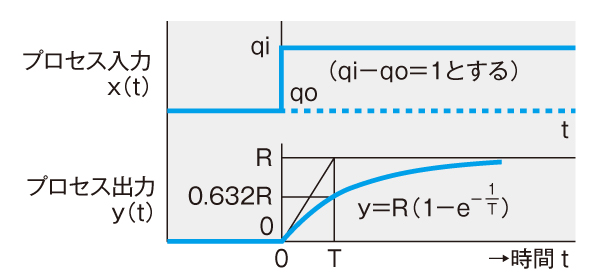
図4 流入量のステップステップ状変化に対するタンクの液位の応答
自己平衡性のあるほかのプロセス例
自己平衡性のあるプロセスは、本例で示したタンクの液位のほかにも実際のプラントや装置の中に数多く存在します。たとえば圧縮性気体の容器の内部圧力はタンクの液位と同様の捉え方ができ、容器への流入量が増えれば内部圧力が上がり、その結果流出量が増加して流入と流出量がバランスします。加熱炉などの温度プロセスでは、加熱して温度を上げればその分放熱が増え、熱移動のバランスが保たれた時点で温度上昇が止まります。また、液体の流量プロセスでポンプの突出圧力が上がり流量が増加すれば、それを妨げるように管路抵抗も増し、ポンプの突出圧力と管路の圧力損出がバランスした流量に落ち着きます。
このように自己平衡性のあるプロセスは、あたかもそれ自体にフィードバック調節計が内蔵されているような動きを示し、自己平衡性のないプロセスに比べると比較的容易な制御対象であるといえます。
補足-タンクの液位制御ループの動作について
フィードバック制御では、コントローラ、操作端、プロセス、検出器を含めた一巡ループの位相遅れが180°になる周期でループが振動したり、発振したりします。自己平衡性のない、積分性のタンクの液位は位相遅れが90°なので、比例制御(P動作)のコントローラのもとでループが振動したり、発振したりすることはありません(*2)。また、自己平衡性のある一次遅れ要素のタンクの液位は、位相遅れが90°未満なので、同様のことが当てはまります。したがって、コントローラの比例帯をできるだけ小さくすれば(比例ゲインを大きくすれば)、ループの制御速度を最大にして動作させることができます。
なお、P動作では残留偏差(オフセット)が生じ、その値はゲインに反比例(比例帯に比例)します。オフセットが液位変動の許容範囲内であれば何ら問題はありませんが、もし、液位を常に一定に保つことが必要な場合には、積分動作を加えたPI動作を適用することでオフセットを解消して対応します。
〈参考文献〉
「プロセス制御システム」 シンスキー著
(岩永正雄・小川 積幸・栗原 宏文・長山 千五郎 訳) 好学社
「計装システムの基礎と応用」 千本 資・花淵 太 共編 オーム社
(*1)実際には非線形ですが、微小範囲内では比例するものとみなします。
(*2)操作端や検出器の時定数がタンク容量の時定数に対して十分に小さいものとします。
(株)エムジー 広報部