



















MECHATROLINK-III(メカトロリンク-III)
近年、工業用EthernetがFAの世界でも様々な場面で使われるようになってきました。工業用Ethernetといっても、その目的に伴い実現の手段が異なり、いくつかのグループに分けることができます。
(1)汎用Ethernetを使用して、ソフトウェアだけで定周期性を実現するもの
(2)汎用Ethernetを使いながら専用のASICを準備し、汎用のプロトコルと定周期のプロトコルを混在させるもの
(3)汎用Ethernetを使いながら、専用のASICを準備し、高速性、定周期性、信頼性を極めるもの
これらは、それぞれに長所短所があり、一概にどれが一番良いというものではありません。MECHATROLINK-IIIで採用している工業用Ethernetは、(3)に属するEthernet通信になります。(1)や(2)のように汎用性をより重視するネットワークと異なり、FA業界における各種製造装置や生産ラインに必要な、信頼性の高い高速モーションネットワークで使われることを主眼として位置づけることができます。
MECHATROLINK-IIIの概要と特徴
MECHATROLINKは、すべてのSubordinate Deviceにおいて同期性を保証するモーションネットワークです。サーボの完全同期はもちろんのことインバータ・ステッピングモータ・スライダなどのアクチュエータや、I/O・温調器・画像装置などのモーションに付随する周辺機器まで接続することができます。つまり、製造装置や生産ラインを構成する上で必要な制御機器すべてを、1つの省配線システムに接続できるというメリットがあります。
従来モーション用ネットワークとI/O用ネットワークを別々に配線していた場合でも、MECHATROLINKを使用すればネットワークの統一を図ることができます。 MECHATROLINK-IIIにおける新しい機能をいくつかご紹介します。
(1)シンプルなカスケード接続と、システム構成に柔軟に対応できるスター接続のサポート!(図1)
カスケード接続は、これまで同様HUBを使用しないシンプルな接続です。リングにする必要もありません。HUBを使用するスター接続では、カスケード接続に比べて、より多くのノードを高速に制御することができます。
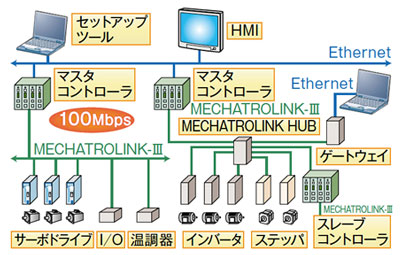
図1 MECHATROLINK-IIIのシステム構成
(2)最大接続Subordinate Device数を62局に増強! 局間ケーブルは最大で100mに延長!(図2)
1回線あたりの接続Subordinate Device数が2倍になりました。また、局間で最大100mまでケーブルを延長することができるため、大規模なシステムにも対応できます。
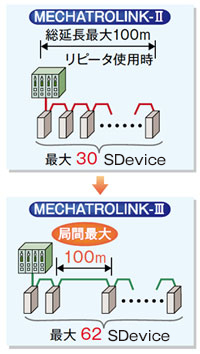
図2 システム対応規模を増大
(3)HUBを使用することによって、そのポートに接続しているノードの活線挿抜ができる。装置の保守のために、一部のSubordinate Deviceを切り離すことが可能!(図3)
HUBを使用すると、そこから分岐している回線を通電中であっても切り離すことができます。システムをメンテナンスする目的や機械の構造的な理由などから、活線挿抜が必要なシステムにも対応できます。
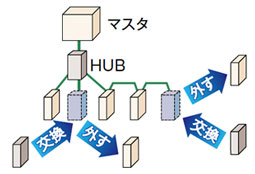
図3 活線挿抜が可能
(4)他の局の情報をリアルタイムでモニタ可能!(図4)
Subordinate Device間で同期制御などを行っている場合、従来Subordinate Device間の異常処理をMain Deviceから行っていた場合でも、Subordinate Device同士でお互いの異常を監視することが可能になります。
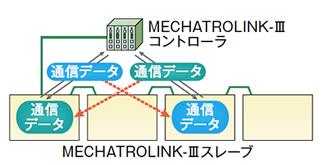
図4 Subordinate Device局が他のSubordinate Device局の通信データをモニタできる
MECHATROLINK-III の仕様
MECHATROLINK-III の伝送仕様を表1に示します。
表1 MECHATROLINK-III 伝送仕様
| 機能仕様 | MECHATROLINK-III |
|---|---|
| 物理層 | Ethernet |
| 通信速度 | 100Mbps |
| 伝送周期 | 31.25μs~64ms |
| 伝送バイト数 [byte](情報部) |
8/16/32/48/64 混在可能 |
| 最大接続Subordinate Device数 | 最大62局 |
| 最大伝送距離 | 局間100m |
| 最小局間距離 | 20cm |
| 接続形態 | カスケード型/スター型 |
| サイクリック/イベントドリブン通信 | サイクリック/イベントドリブン通信 |
| メッセージ通信 | メッセージ通信可 |
| 他局モニタ機能 | あり |
| コネクタ | FA用RJ-45またはインダストリアルミニI/Oコネクタ |
| ケーブル | Ethernet Cat5e |
| 通信ASIC | JL-100(FBGA)、JL-101(LQFP) いずれもMain Device/Subordinate Device兼用 |
- MECHATROLINK-III の詳細については下記ホームページをご参照ください。
参考ホームページ:https://www.mechatrolink.org/

【原稿提供:MECHATROLINK協会】